Cockroach_RegistrationRIManual
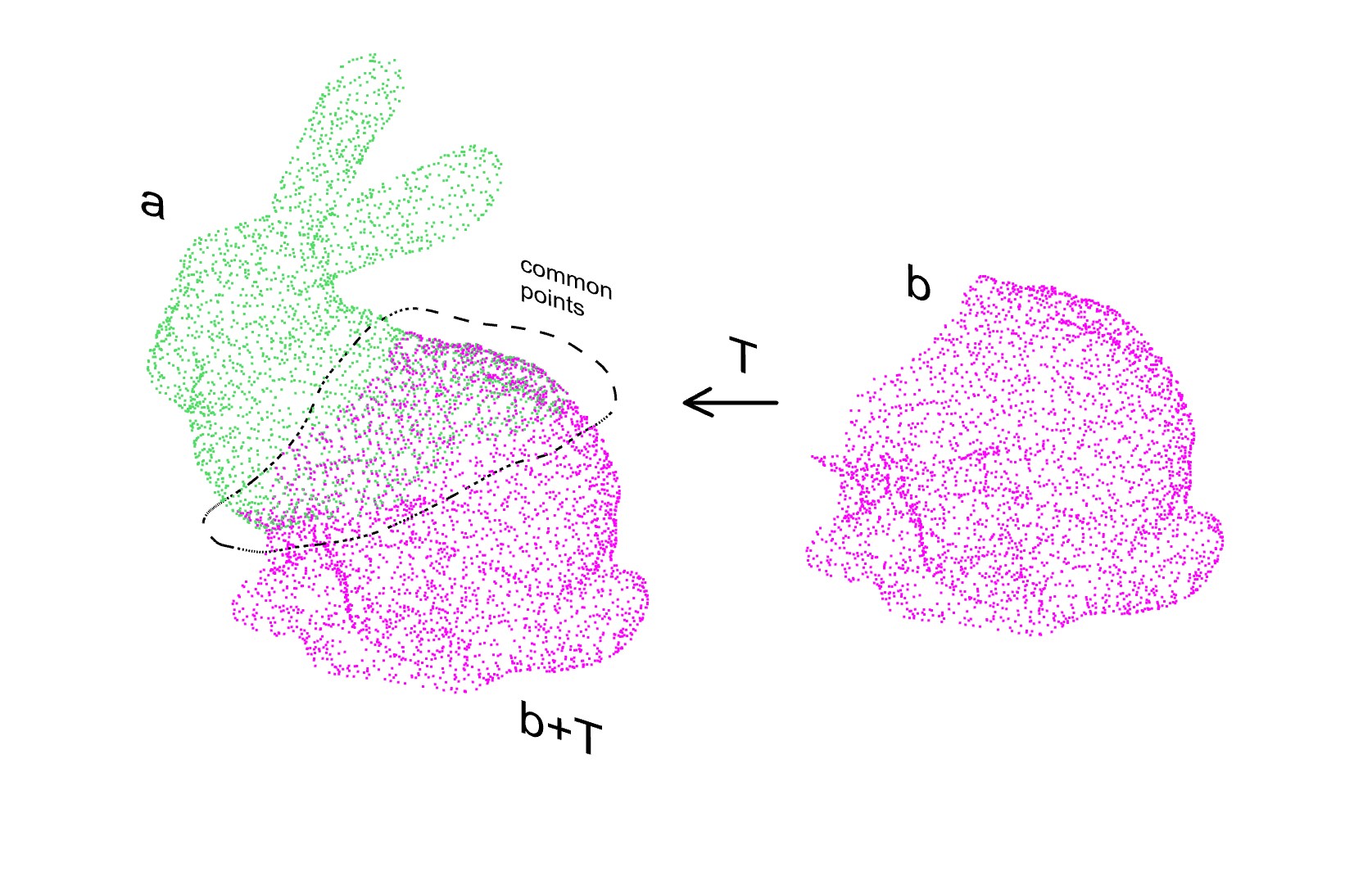
This command stich two clouds together. This is also called a registration or alignement of two point clouds. To be working correctly the two clouds should share app. 1/3 of their points. The command will output a cloud that is the result of the registration of the two input clouds. Note that this is a supervised algorithm, meaning that you will need to press Space to repeat the algorithm. The algorithm will stop when you decide after each step to stop. Besides visual clous of a good point cloud match, you can also check the log output in the terminal. This is what you will see:
-------------------------0 / 21------------- 👈 the number of iterations
Registration RI took: 0.0971272 seconds 👈 the time it took to compute the registration
Registration fitness result: 0.464567 👈 fitness is how well the two clouds match
Registration RMSE result: 0.0108833 👈 the RMSE is the distance between the two clouds
For the fitness values: the closer to 1 the better the match. For the RMSE values: the smaller the better the match.
The function is an iterative loop based on the registration algorithms from Open3d open3d::pipelines::registration::RegistrationRANSACBasedOnFeatureMatching, and ICP (Point to plane), open3d::pipelines::registration::RegistrationICP combined.
🔎 There is also a command version full authomatic
Cockroach_RegistrationRI. But we reccomand to use this manual one since you can stop the stiching process whenever you want.
Command options:
VoxelSize=0.005
When we perform the registration we are not performing the algorithm on the full resolution point cloud, but on a downsampled one. The computed rigid transformation will be applied to the full resolution though. If the cloud is already downsampled, set this value to 0.
NnumberRepetion=20
It’s the number of total repetitions of the registration algorithm.
ColorPointCloud=False
Whether to color the output cloud with random colors or keep the original colors.