Rotation
Geometric definition
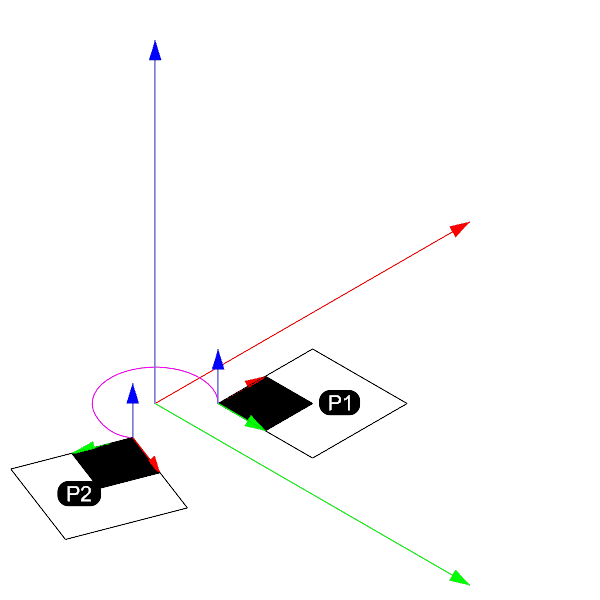
A rotation is a transformation that turns a geometry around a point (known as center of rotation) or an axis and can be defined by an angle. The angle can be defined in degrees or radians.
How to add
As often is possible in Rhino to use either RhinoCommons or RhinoScriptSynthax to add a point to the Rhino workspace. Here are the two methods:
RhinoCommons
import Rhino.Geometry as rg
import scriptcontext as sc
import math as m
# create a rectangle
rectangle = rg.Rectangle3d(rg.Plane.WorldXY, 10, 10)
# create a rotation transformation with RhinoCommon
angle_degrees = 45
angle_radians = m.radians(angle_degrees)
rotation = rg.Transform.Rotation(angle_radians, # angle in radians
rg.Vector3d.ZAxis, # rotation axis
rg.Point3d.Origin) # rotation center
# transform the rectangle with RhinoCommon
rectangle.Transform(rotation)
# add the rectangle to the document
sc.doc.Objects.AddRectangle(rectangle)
RhinoScriptSynthax
import rhinoscriptsyntax as rs
# create a rectangle
rectangle_id = rs.AddRectangle(rs.WorldXYPlane(), 10, 10)
# create a rotation transformation
rotation = rs.XformRotation2(
45, # angle of rotation in degrees
[0, 0, 1], # axis of rotation
[0, 0, 0] # center of rotation
)
# transform the rectangle
rs.TransformObject(rectangle_id, rotation, copy=True)
Main methods and properties
Operators
Rotations as all the other transformations have a set of operators that can be used to perform to combine transformations (also different kinds, e.g.: translation with rotation). Here are the main ones:
xform_1 = rg.Transform.Rotation(m.radians(45), rg.Vector3d.ZAxis, rg.Point3d.Origin)
xform_2 = rg.Transform.Rotation(m.radians(45), rg.Vector3d.ZAxis, rg.Point3d.Origin)
xform_3 = xform_1 * xform_2 # Will combine the two transformations
⚠️ Note that the order of the transformations is important. In the example above the first transformation will be applied first and the second transformation will be applied second. ⚠️
Properties
Rotations as all the other transformations have a set of properties that can be used to retrieve information about the transformation. Here are the main ones:
rotation = rg.Transform.Rotation(m.radians(45), rg.Vector3d.ZAxis, rg.Point3d.Origin)
rotation.IsIdentity # Will return True if the transformation is an identity transformation
rotation.IsZero # Will return True if the transformation is a zero transformation
rotation.IsValid # Will return True if the transformation is valid
🛠 Exercises
Starting file:
01: 🦏⬇️⬇️⬇️ Download the file here ⬇️⬇️⬇️🦏 01: 🐍⬇️⬇️⬇️ Download the script here ⬇️⬇️⬇️🐍
Solution:
01: 🦏⬇️⬇️⬇️ Download the file here ⬇️⬇️⬇️🦏 01: 🐍⬇️⬇️⬇️ Download the script here ⬇️⬇️⬇️🐍